WEEK 11
FINALIZED DESIGN


RATIONALE
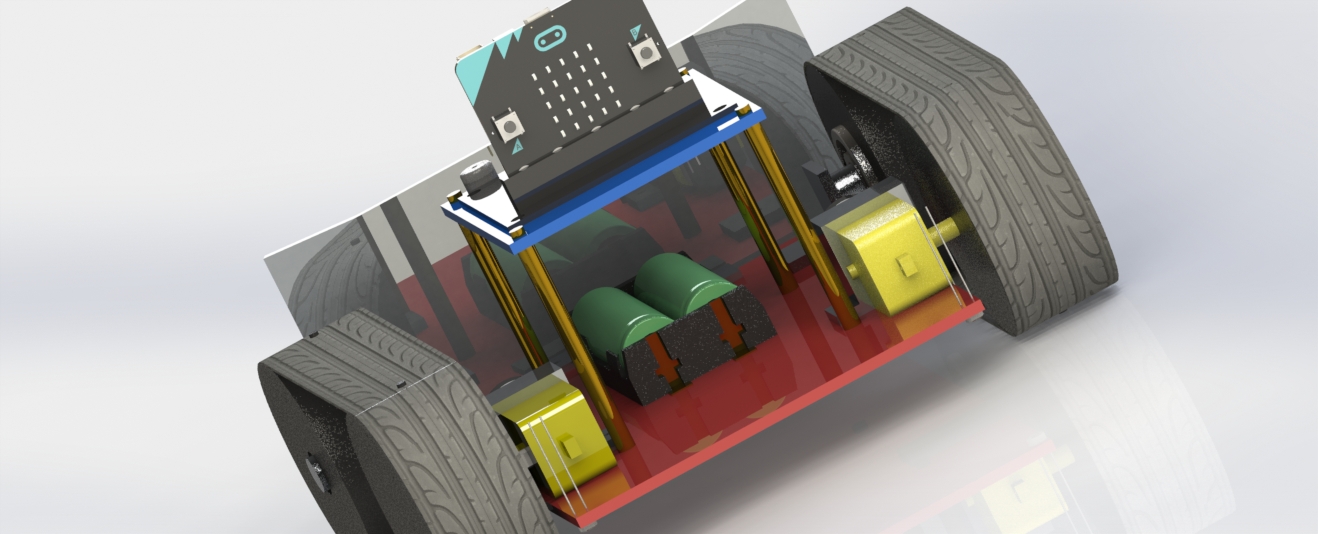
For our design we went for a simplistic design that was based off the concept of our sumo bot being driven off a set of tracks much like the robot you see in the movie WALL-E as you can see our bot has some similarities. Our design is a simple design with no major manufacturing. The simple chasse design allows for maximum space to be used as it allows for a top shelf to be incorporated. This top shelf allowed for all essential hardware like micro:bit, sensors, and buzzers to have there designated area and make wiring to the battery source as tidy and straightforward as possible. Having the majority of components on the top shelf allows for plenty of room for the two DC motors and there accompanying brackets to have space to fix to the chase. The two track and wheels are the moving parts of the bot so having them as far away as possible from wires and competed is essential so there is no interference. The plough in the front acts as our defense and attack mechanism. Even though it is very simplistic we both agreed that having our bot as bulky and rectangular as possible will allow for a strong defense again other bots that have different designs like slanted fronts and things like that. As it acts as a defense as well as a attack make it an easy multipurpose tool.
LIMITATIONS
The limitations of our design is really based on our track and wheel design. There is a possibility that the selected material for the track which is the fan belt from a car will not have enough friction with the g round and result in our bot being pushed back and not hold its position. Another factor will be trying to get the right tension with the track and wheel, this could be a struggle and may take a lot of trial and error.
IMPROVEMENTS
It is hard to say if improvements could be made when we haven’t physically made the project. We both had an idea to add some sort of ramp attacked to the bottom of the plough to get underneath the enemy bot and then push the bot forward so the plough could really be used to full potential but due to sizing restrictions we were unsure if we would have to change a few different characteristics to allow for this. The simple layout of the chasse allows room for error and improvements as we can move certain components to different positions to maximize functionality as our design does not restrict spacing and movement.
MATERIAL SELECTION
Our material selection was quite a simple one for a number of reasons. There was weight limit of 1kg so there was a restriction in place, obviously you would make the bot as heavy as possible so something like steel for the chasse could have been used if there wasn’t a limit. The choice of Perspex was made for the simple reason that it can be laser cutter so this aloud for a quick and easy solution to the accurate work needed. Although it is light adding the four brass bars as supports was used to add weight instead of aluminium bars. The front plough was made as big as possible again due to the fact we were using aluminium which is quite a light material. Overall our material selection was based off the weight, work-ability and the speed we work these materials.
Overall I think our design shows that a simple design can sometimes be the best and from the research of last years winner of the sumo bot contest simplicity was the key so why change something that’s not broken.
